Sensopoda
Sensopoda is a sensory-assisted focus system for filming with DSLR cameras. Instead of using the internal autofocus system of a camera, which was mainly developed as an aid in taking pictures in photo mode, Sensopoda gives the filmmaker the ability to freely control the focus of the lense in video mode. There is no need for a second camera operator to pull the focus from one object to another anymore. Furthermore due to its flexible plug-and-play + automated calibration approach, Sensopoda is a system that fits into every possible existing filming set-up. Starting from simple tripods to spider and wheel rigs, to different camera body types and lenses, e.g. Canon, Nikon, Olympus, Pentax, Sony and all their respective lenses that at least offer a manual focus ring.
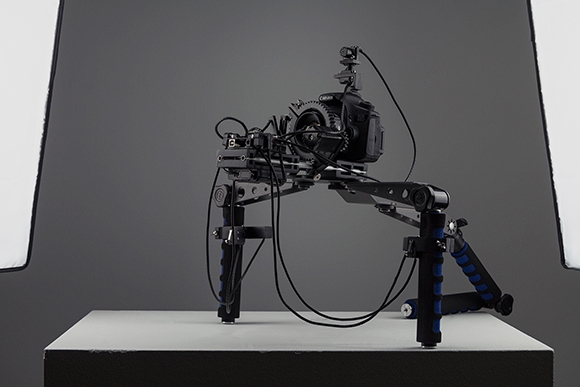
Sensopoda is a system, that bridges a technology gap of a more flexible auto-focus with especially DSLR cameras while filming. It supports the filmmaker with pulling the focus automatically with the help of a mid-range proximity sensor and thus allows the filmmaker to concentrate more on the own movement and composition of the frame.
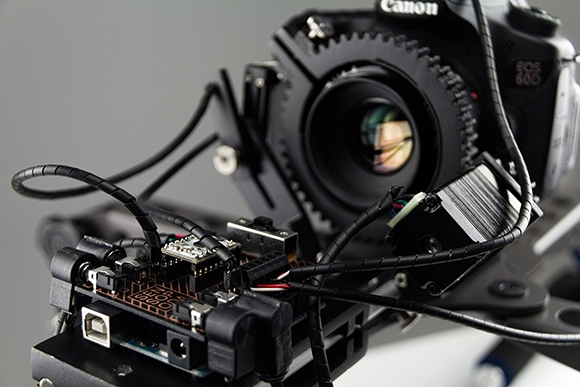
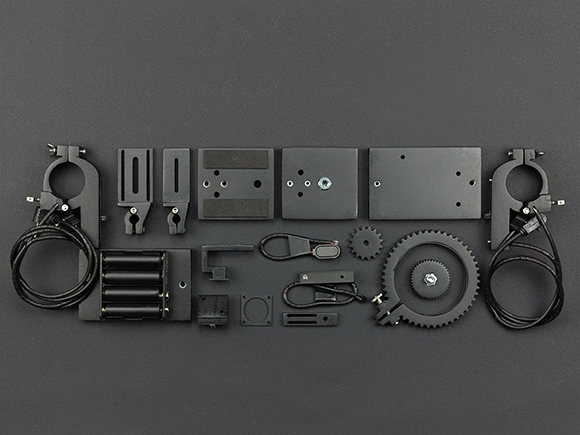
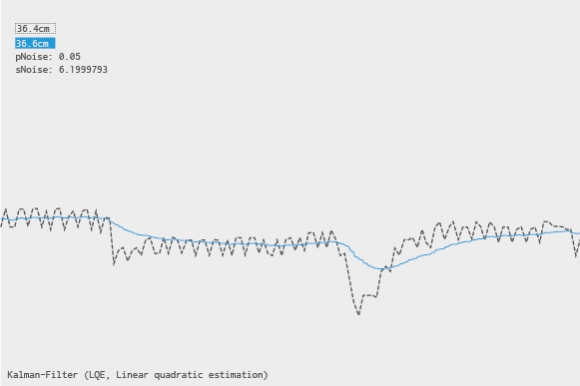
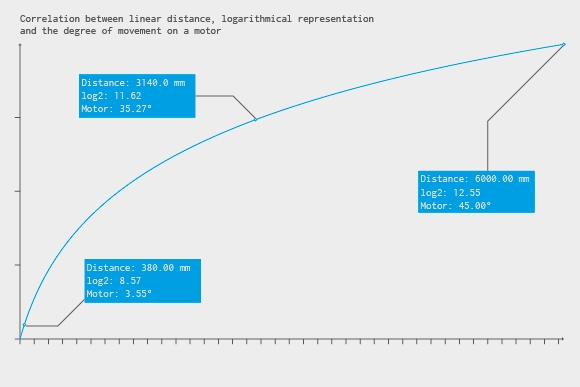
The project involved a short and extensive research and experimentational phase, that was set-up in a modular fashion. By breaking down all the required parts into smaller parts and testing them out one by one, it was easy to tell and verify what would work and what not in a finished “product”. In this way we could test out all of the core functions, such as auto-calibration mapping of the lens to the rotation of the motor, controlling the video mode of different camera body types by using an Infrared LED and simple starting codes, a profound research on the physics of light and the emerging correlations for our system, utilizing of a Kalman-filter to smooth out the racking focus between objects or just the handling of interrupting signals of the sensors inside the system.
The name of the project is loosely based on the idea of having a core system – a head – which has many arms and can control them at any point of time. So in a sense it reminds of a small Octopoda. In a more philosophical way, these arms don’t have to be tangible in any way: they can be just fragments of code, which are responsible for different interactions inside the system next to real cables that are connecting the different parts of the system.
A full documentation of the project is also available.

The project was featured on Hackaday.